EURMARS – A Multimodal Fusion Architecture for Sensor Applications (MuFASA)
Article by
AIT Austrian Institute of Technology
The overall vision of the project is to develop a platform that will improve sensing capabilities for wider areas by integrating high altitude technology, satellite imagery and UxVs in addition to ground sensor platforms in order to prevent, detect and react to crime, including that crossing external borders, illegal border crossings and/or smuggling at the border regions of the EU and of the Schengen area. With this challenge a wide arsenal of sensors and external data sources is needed to withstand the complexity of the use-cases. Thus, a sophisticated data fusion approach within a modular architecture is essential.
In EURMARS data fusion has a central role in combing homogeneous and heterogenous data with the goal to improve the overall confidence in detecting use-case specific events. In particular, the data fusion capabilities involve the alignment of the different data delivered by the individual sensors and systems to gain additional information which can not be obtained by individual systems alone. The goal is to decrease false alarms by combining different data sources as well as increase measurement precision to metadata interpretation.
To achieve this goal, different individual data fusion modules are being developed or further improved within EURMARS. Some of them already have shown great promise in previous projects (e.g FOLDOUT), such as the MuFASA (Multimodal Fusion Architecture for Sensor Applications) developed by AIT.
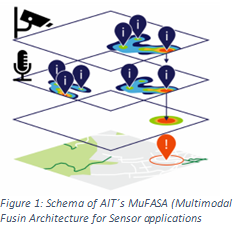
MuFASA addresses various disciplines in terms of Data Fusion on different levels, such as data imperfection, data alignment/registration and data heterogeneity. In this senses MuFASA provides data fusion methodologies and modules dedicated to said tasks. In EURMRAS, the capabilities of MuFASA will be further improved and developed and are focusing on feature level data fusion. On feature level, MuFASA incorporates a multimodal data fusion methodology based on inference (Bayesian). Beside establishing spatio-temporal coincidence of sensor observations an increased confidence and robustness of a sensing system is achieved.
It´s main advantaged are summarized in a reduction of the overall alarm rates as well as geo-localized fused events. MuFASA therefore benefits in:
- Time saving when verifying alarms
- Same sensor technology as competitors, better detection rates and fewer false alarms.
- Trust in overall sensor system is strengthened
- No installation effort
By providing a real-time data fusion approach, sensor observation immediately can be fused to establish situational awareness in the use-cases defined within the EURMARS project. One challenge in the given setting is, that not only real-time data is available, but also semi-real time data (such as satellite images) and external data sources such as AIS[1]. This puts MuFASA before a new set of challenges, which will be evaluated within the project scope.
Due to its core methodology (inference), MuFASA excels in reducing the overall false alarms produced by single sensor systems. This is considered as one of the main impacts of the EURMARS system.
[1] AIS – Automatic identification system – Transponders are designed to be capable of providing position, identification, and other information about the ship to other ships and to coastal authorities automatically.